












УГЛУБЛЕННЫЙ ВЗГЛЯД НА 3D-ЗОНДИРОВАНИЕ
Coherent — ведущий поставщик передовых решений по освещению для приложений 3D-зондирования.
Мир трехмерен. Это утверждение настолько очевидно, что большинство из нас никогда не задается вопросом, как мы его воспринимаем. Но на самом деле каждый наш глаз фиксирует плоское изображение – точно так же, как фотоаппарат. И только в нашем мозгу происходит волшебство формирования трехмерного восприятия из этих двух плоских изображений.
Сегодня мы все чаще просим цифровые системы взаимодействовать с трехмерным миром – будь то интерпретация жестов управления, распознавание лиц или автоматическое управление транспортным средством. Чтобы выполнить эти задачи, нам нужно дать им хотя бы часть нашей способности воспринимать глубину.
ОЦЕНИВАНИЕ ГЛУБИНЫ
Существует два основных подхода, используемых для 3D-зондирования (глубины) в цифровых изображениях: измерения триангуляции и времени пролета (ToF). Иногда эти методы даже комбинируют.
Триангуляция основана на геометрии. Одна из форм триангуляции – бинокулярное зрение – представляет собой способ работы человеческого трехмерного (стереоскопического) зрения. У нас есть два глаза, разделенные горизонтально. Это означает, что каждый глаз видит мир под немного разным углом. Эта разница в перспективе создает параллакс, то есть смещение положения объекта относительно фона в зависимости от того, каким глазом вы смотрите. Затем наш мозг использует эту информацию о параллаксе, чтобы ощутить глубину (расстояние) объектов в нашем поле зрения и создать наше единое трехмерное восприятие мира.
Но стереовидение может зависеть от условий освещения и требует четкой текстуры поверхностей. Это затрудняет надежную реализацию. Вместо этого системы компьютерного зрения используют другую форму триангуляции, основанную на «структурированном свете». Это просто причудливое название для проецирования узора (например, серии линий или многочисленных пятен света) на объект и анализа искажения этого узора под несколько иным углом. Это требует гораздо меньше вычислительной мощности, чем воссоздание истинного бинокулярного зрения, и позволяет компьютеру быстро рассчитывать информацию о глубине и реконструировать трехмерную сцену.
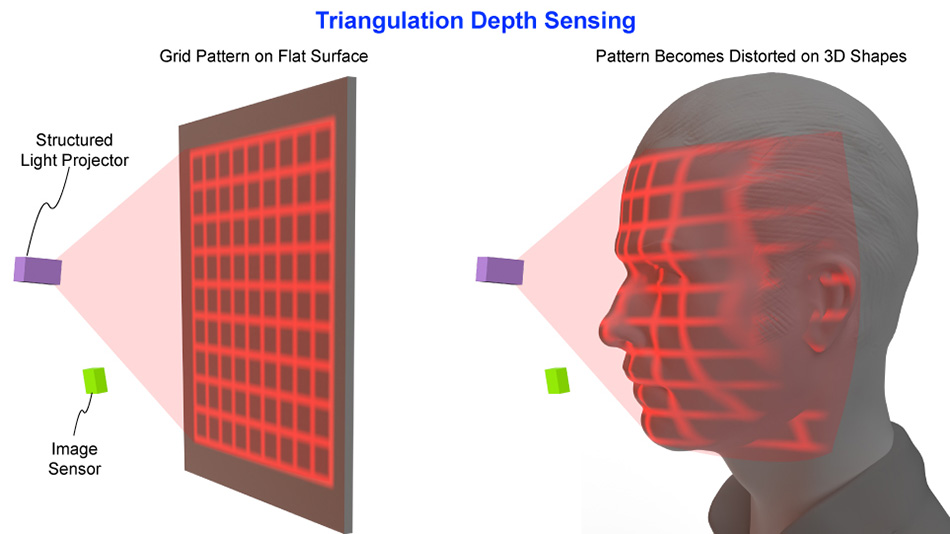
В одной из форм измерения глубины триангуляции структурированный световой узор проецируется на сцену, и система формирования изображений анализирует искажение этого рисунка, чтобы получить информацию о глубине для освещенной области.
Методы триангуляции превосходно подходят для картографирования поверхностей с высоким разрешением. Лучше всего они работают на более коротких расстояниях, что делает их очень полезными для таких задач, как распознавание лиц.
Времяпролетная визуализация (ToF) существует в двух разных формах. В режиме «прямого времени пролета» (dToF) сцена освещается импульсами света, и система измеряет время, необходимое для возвращения отраженных световых импульсов. Поскольку скорость света известна, это время возврата может быть напрямую конвертируется в расстояние. Если этот расчет выполняется независимо для каждого пикселя изображения, то можно получить значение глубины в каждой точке сцены.
Вторая форма ToF — это «косвенное времяпролетное измерение» (iToF). Здесь освещение представляет собой непрерывный модулированный сигнал. Система измеряет фазовый сдвиг этой модуляции в отраженном свете. Это предоставляет данные, используемые для расчета расстояний до объектов.
Технология ToF отличается своей способностью быстро измерять большие площади и расстояния. Это делает его идеальным для таких задач, как сканирование помещения с помощью гарнитур виртуальной реальности или обнаружение препятствий для навигации робота.
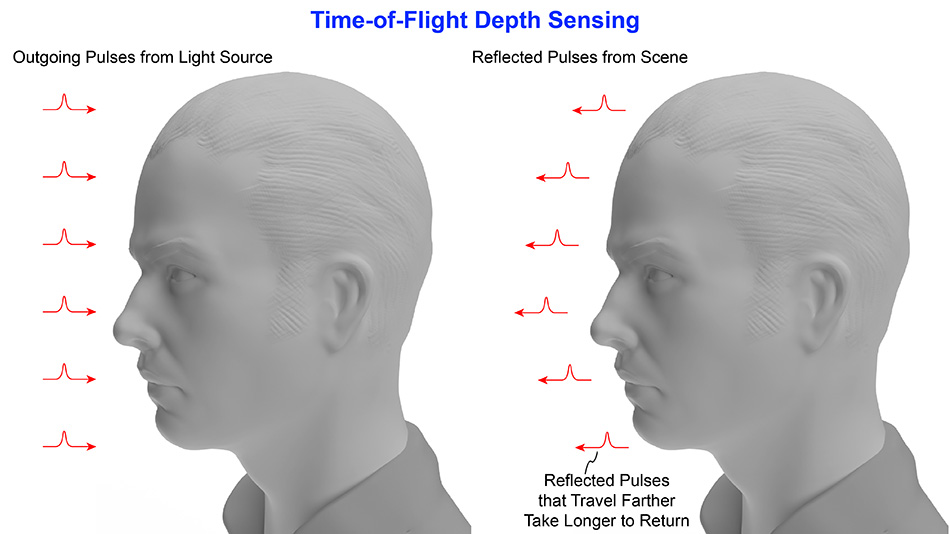
Прямое измерение времени пролета измеряет время прохождения световых импульсов туда и обратно и преобразует временные интервалы в измерения расстояния.
ТРЕБОВАНИЯ К ИСТОЧНИКУ СВЕТА 3D-ЗОНДИРОВАНИЯ
Характеристики источника света имеют решающее значение для определения эффективности и точности методов триангуляции и 3D-зондирования ToF. Каждое приложение имеет уникальные требования к освещению, хотя у них также есть некоторые общие потребности.
Триангуляция выигрывает от когерентного источника света. Это обеспечивает большую гибкость с точки зрения создаваемых шаблонов. Это также позволяет им формировать структурированные узоры с более высоким разрешением и сохранять целостность узоров на больших расстояниях.
Триангуляционный источник света также должен иметь стабильные характеристики наведения луча. Любые их колебания могут привести к неточным измерениям глубины.
Для систем ToF требуется источник света, способный излучать либо короткие точные импульсы света (dToF), либо непрерывный выходной сигнал, который можно модулировать на высоких частотах (iToF). Точность синхронизации импульсов и частоты модуляции с коротким временем нарастания и спада имеет первостепенное значение для точного измерения расстояния.
Системы ToF, особенно те, которые используют заливающее освещение для покрытия больших площадей или больших расстояний, обычно требуют более высокой выходной мощности, чем системы триангуляции. Это гарантирует, что отраженный свет будет иметь достаточную интенсивность для обнаружения и что система будет хорошо работать при высоком уровне окружающего освещения.
По мере увеличения выходной мощности потребность в энергоэффективности (отношении выходной оптической мощности к входной электрической мощности) становится все более важной. Эффективность становится особенно актуальной для портативных (работающих от аккумулятора) устройств.