












深入了解 3D 传感
Coherent 是 3D 传感应用先进照明解决方案的领先供应商。
世界是三维的。这句话是如此明显,以至于我们大多数人从不质疑我们是如何看待它的。但事实上,我们的每只眼睛都会捕捉到平面图像——就像相机一样。只有在我们的大脑中,从这两个平面图像形成 3D 感知的魔力才会发生。
如今,我们越来越多地要求数字系统与 3D 世界进行交互——无论是解释手势控制、执行面部识别还是自动驾驶车辆。为了完成这些任务,我们至少需要赋予它们一些感知深度的能力。
深度传感
数字成像中的 3D(深度)传感有两种基本方法:三角测量和飞行时间 (ToF) 测量。有时甚至将这些技术结合起来。
三角测量基于几何学。三角测量的一种形式——双眼视觉——是人类 3D(立体)视觉的运作方式。我们有两只水平分开的眼睛。这意味着每只眼睛从稍微不同的角度看世界。这种透视差异会产生视差,这意味着物体相对于背景的位置会发生变化,具体取决于您用哪只眼睛看。然后,我们的大脑使用这种视差信息来感知视野中物体的深度(距离),并创建我们对世界的单一、统一的 3D 感知。
但立体视觉可能取决于照明条件,并且需要独特的纹理表面。这些都使得难以可靠地实施。相反,计算机视觉系统使用另一种依赖“结构光”的三角测量形式。这只是一个奇特的名称,用于将图案(如一系列线条或许多光点)投影到物体上并从稍微不同的角度分析该图案的扭曲。与重新创建真正的双眼视觉相比,这所需的处理能力要少得多,并且它使计算机能够快速计算深度信息并重建 3D 场景。
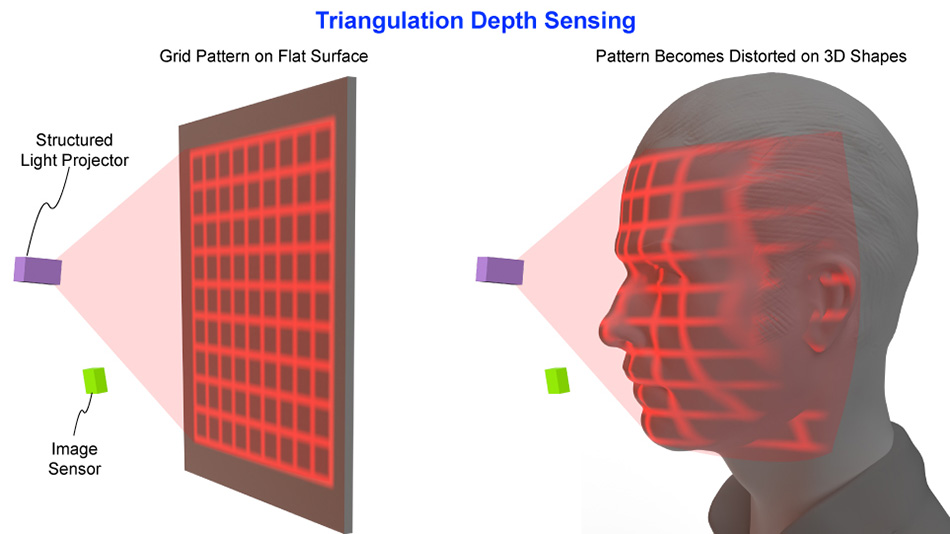
在三角测量深度感测的一种形式中,结构光图案被投影到场景上,并且成像系统分析该图案的失真以导出照明区域的深度信息。
三角测量方法在高分辨率表面映射方面表现出色。它们在较短的距离内效果最佳,这使得它们对于面部识别等任务非常有用。
飞行时间成像 (ToF) 有两种不同的形式。在“直接飞行时间”(dToF) 中,场景用光脉冲照明,系统测量反射光脉冲返回所需的时间。由于光速已知,因此该返回时间可以为如果对图像中的每个像素独立执行此计算,则可以导出场景中每个点的深度值。
ToF 的第二种形式是“间接飞行时间”(iToF)。这里,照明是连续的调制信号。该系统测量返回光中这种调制的相移。这提供了用于计算物体距离的数据。
ToF 技术的亮点在于能够快速测量更大的区域和距离。这使得它非常适合虚拟现实耳机中的房间扫描或机器人导航的障碍物检测等任务。
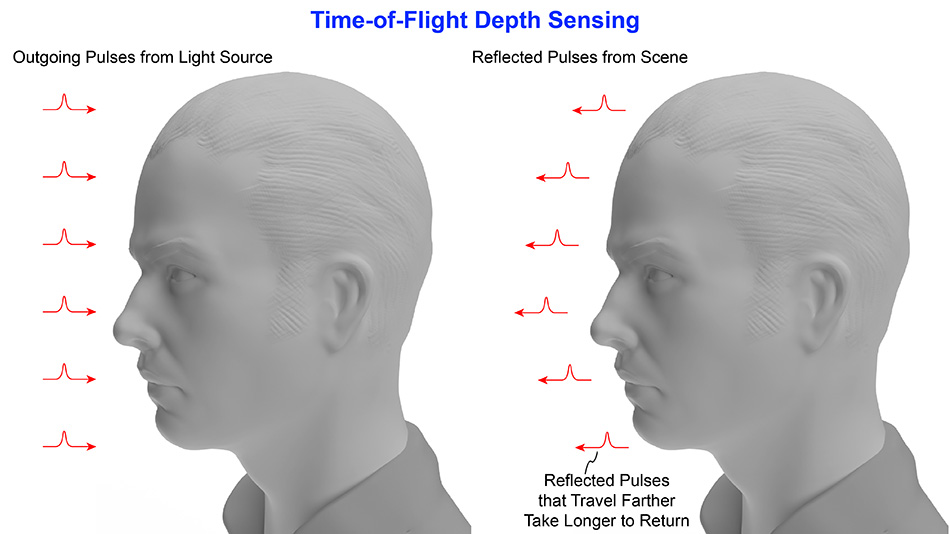
直接飞行时间传感测量光脉冲的往返传播时间,并将时间间隔转换为距离测量值。
3D 传感光源要求
光源的特性对于确定三角测量和 ToF 3D 传感方法的有效性和准确性至关重要。每个应用都有独特的照明要求,尽管它们也有某些共同的需求。
三角测量受益于相干光源。这在可创建的模式方面提供了更大的灵活性。它还使它们能够形成更高分辨率的结构化图案,并在更长的距离内保持图案的完整性。
三角测量光源还需要具有稳定的光束指向特性。这些的任何波动都可能导致深度测量不准确。
ToF 系统需要能够发射短而精确的光脉冲 (dToF) 或可高频调制的连续输出 (iToF) 的光源。脉冲定时和调制频率的精度以及较短的上升和下降时间对于精确的距离测量至关重要。
ToF 系统,特别是那些使用泛光照明来覆盖大面积或长距离的系统,通常需要比三角测量系统更高的输出功率。这确保了返回光具有足够的强度以供检测,并且系统能够在高水平的环境光下正常运行。
随着输出功率的增大,对功率效率(光输出功率与输入电功率的比率)的需求变得更加重要。效率对于便携式(电池供电)设备尤为重要。