












UM OLHAR APROFUNDADO DA SENSORIZAÇÃO 3D
A Coherent é fornecedora líder de soluções avançadas de iluminação para aplicações de detecção 3D.
O mundo é tridimensional. Essa afirmação é tão óbvia que a maioria de nós nunca questiona como a percebemos. Mas, na verdade, cada um dos nossos olhos captura uma imagem plana – tal como uma câmara. E é apenas em nossos cérebros que ocorre a mágica de formar uma percepção 3D a partir dessas duas imagens planas.
Hoje, pedimos cada vez mais que os sistemas digitais interajam com o mundo 3D – seja para interpretar controles gestuais, realizar reconhecimento facial ou pilotar automaticamente um veículo. Para realizar essas tarefas, precisamos dar-lhes pelo menos um pouco da nossa capacidade de perceber a profundidade.
SENSOR DE PROFUNDIDADE
Existem duas abordagens básicas usadas para detecção 3D (profundidade) em imagens digitais: triangulação e medições de tempo de voo (ToF). Às vezes, essas técnicas são até combinadas.
A triangulação é baseada na geometria. Uma forma de triangulação – visão binocular – é a forma como a visão humana 3D (estereoscópica) funciona. Temos dois olhos separados horizontalmente. Isso significa que cada olho vê o mundo de um ângulo ligeiramente diferente. Essa diferença de perspectiva cria uma paralaxe, ou seja, uma mudança na posição de um objeto em relação ao fundo, dependendo do olho com o qual você está olhando. Nossos cérebros então usam essas informações de paralaxe para sentir a profundidade (distância) dos objetos em nosso campo de visão e criar nossa percepção 3D única e unificada do mundo.
Mas a visão estéreo pode depender das condições de iluminação e requer superfícies texturizadas distintas. Isso dificulta a implementação confiável. Em vez disso, os sistemas de visão computacional usam outra forma de triangulação que depende de “luz estruturada”. Este é apenas um nome sofisticado para projetar um padrão (como uma série de linhas ou numerosos pontos de luz) em um objeto e analisar a distorção desse padrão de um ângulo ligeiramente diferente. Isso exige muito menos poder de processamento do que recriar a verdadeira visão binocular e permite que um computador calcule rapidamente informações de profundidade e reconstrua uma cena 3D.
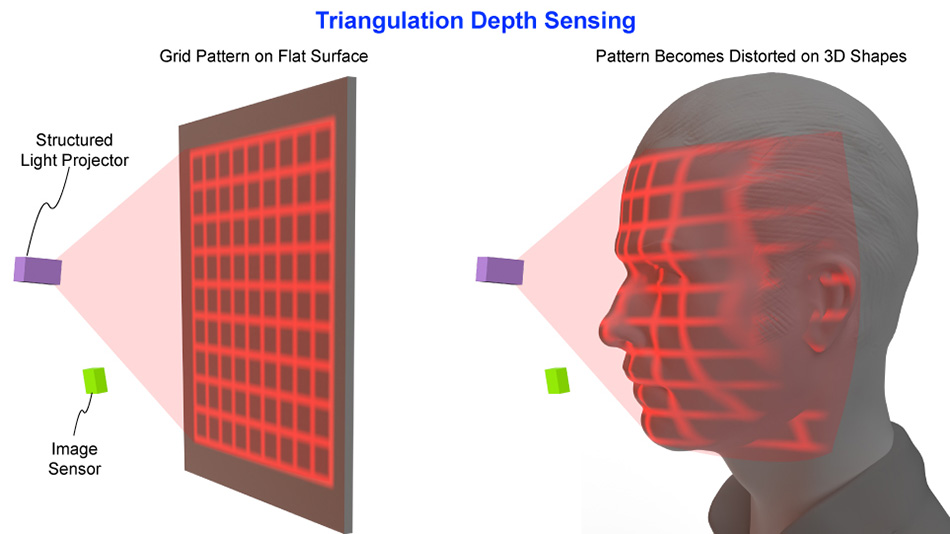
Numa forma de detecção de profundidade por triangulação, um padrão de luz estruturado é projetado na cena e um sistema de imagem analisa a distorção desse padrão para obter informações de profundidade para a área iluminada.
Os métodos de triangulação são excelentes no mapeamento de superfícies de alta resolução. Eles funcionam melhor em distâncias mais curtas, o que os torna muito úteis para tarefas como reconhecimento facial.
A imagem de tempo de voo (ToF) vem em duas formas diferentes. No “tempo de voo direto" (dToF), a cena é iluminada com pulsos de luz e o sistema mede o tempo que leva para os pulsos de luz refletidos retornarem. Como a velocidade da luz é conhecida, esse tempo de retorno pode ser convertido diretamente em distância. Se esse cálculo for realizado de forma independente para cada pixel em uma imagem, um valor de profundidade em cada ponto da cena poderá ser derivado.
A segunda forma de ToF é “tempo de voo indireto” (iToF). Aqui, a iluminação é um sinal modulado contínuo. O sistema mede a mudança de fase desta modulação na luz retornada. Isso fornece os dados usados para calcular distâncias de objetos.
A tecnologia ToF brilha em sua capacidade de medir áreas e distâncias maiores rapidamente. Isso o torna ideal para tarefas como varredura de salas em fones de ouvido de realidade virtual ou detecção de obstáculos para navegação de robôs.
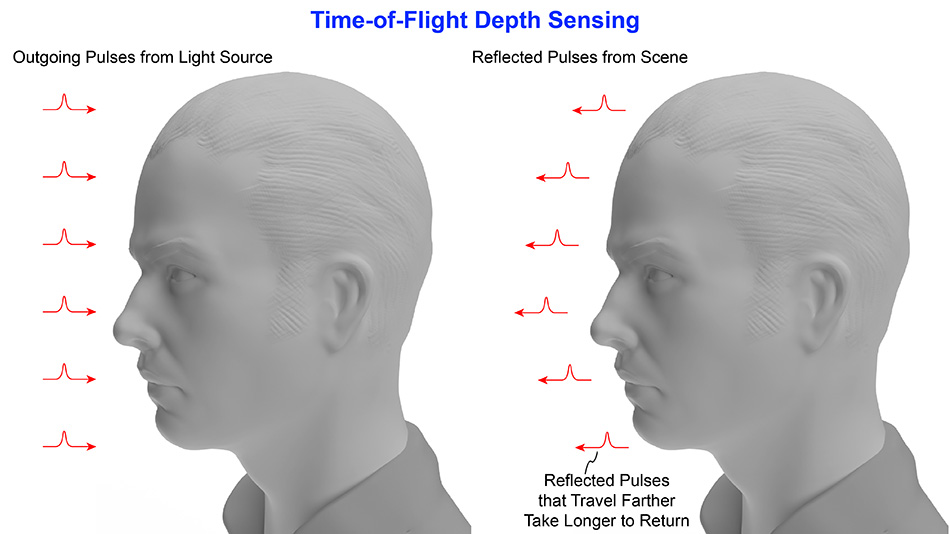
A detecção direta do tempo de voo mede o tempo de viagem de ida e volta dos pulsos de luz e converte os intervalos de tempo em medições de distância.
REQUISITOS DE FONTE DE LUZ DE DETECÇÃO 3D
As características da fonte de luz são cruciais para determinar a eficácia e a precisão dos métodos de triangulação e de detecção ToF 3D. Cada aplicação possui requisitos de iluminação exclusivos, embora também tenham certas necessidades comuns.
A triangulação se beneficia de uma fonte de luz coerente. Isso proporciona maior flexibilidade em termos dos padrões que podem ser criados. Também permite formar padrões estruturados de alta resolução e manter a integridade do padrão em distâncias mais longas.
Uma fonte de luz de triangulação também precisa ter características estáveis de direcionamento do feixe. Quaisquer flutuações nestes podem levar a medições de profundidade imprecisas.
Os sistemas ToF requerem uma fonte de luz capaz de emitir pulsos de luz curtos e precisos (dToF) ou saída contínua que pode ser modulada em altas frequências (iToF). A precisão no tempo de pulso e na frequência de modulação com tempos curtos de subida e descida é fundamental para uma medição precisa da distância.
Os sistemas ToF, especialmente aqueles que utilizam iluminação por inundação para cobrir grandes áreas ou longas distâncias, geralmente requerem potências de saída mais altas do que os sistemas de triangulação. Isto garante que a luz de retorno terá intensidade suficiente para ser detectada e que o sistema funcionará bem com altos níveis de luz ambiente.
À medida que a potência de saída aumenta, a necessidade de eficiência energética (a relação entre a potência de saída óptica e a energia elétrica de entrada) torna-se mais importante. A eficiência torna-se particularmente relevante para dispositivos portáteis (operados por bateria).