












3D センシングの詳細
Coherent は、3D センシング アプリケーション向けの高度な照明ソリューションを提供する大手プロバイダーです。
世界は三次元です。この言葉はあまりにも明白なので、私たちのほとんどはそれをどのように認識しているかについて疑問を抱くことはありません。しかし、実際には、私たちのそれぞれの目は、ちょうどカメラと同じように、平面的な画像を捉えています。そして、これら 2 つの平面画像から 3D 認識を形成する魔法が起こるのは、私たちの脳内だけです。
今日、ジェスチャー制御の解釈、顔認識の実行、車両の自動操縦など、デジタル システムに 3D 世界との対話を求めることが増えています。これらのタスクを達成するには、深さを認識する能力の少なくとも一部をそれらに与える必要があります。
深度センシング
デジタル イメージングにおける 3D (深度) センシングには、三角測量と飛行時間 (ToF) 測定という 2 つの基本的なアプローチが使用されます。場合によっては、これらのテクニックが組み合わされることもあります。
三角形分割は幾何学に基づいています。三角測量の 1 つの形式である両眼視は、人間の 3D (立体) 視覚の動作方法です。水平方向に離れた 2 つの目があります。これは、それぞれの目でわずかに異なる角度から世界を見ていることを意味します。この視点の違いにより視差が生じます。これは、どちらの目で見ているかに応じて、背景に対するオブジェクトの位置が変化することを意味します。次に、私たちの脳はこの視差情報を使用して、視野内のオブジェクトの奥行き (距離) を感知し、単一の統一された 3D の世界認識を作成します。
しかし、立体視は照明条件に依存する可能性があり、独特のテクスチャーのある表面が必要です。これらにより、確実に実装することが困難になります。代わりに、コンピューター ビジョン システムは、「構造化光」に依存する別の形式の三角測量を使用します。これは、パターン (一連の線や多数の光点など) をオブジェクトに投影し、このパターンの歪みを少し異なる角度から分析するための単なる派手な名前です。これは、真の両眼視を再現するよりもはるかに少ない処理能力で済み、コンピュータが奥行き情報を迅速に計算して 3D シーンを再構築できるようになります。
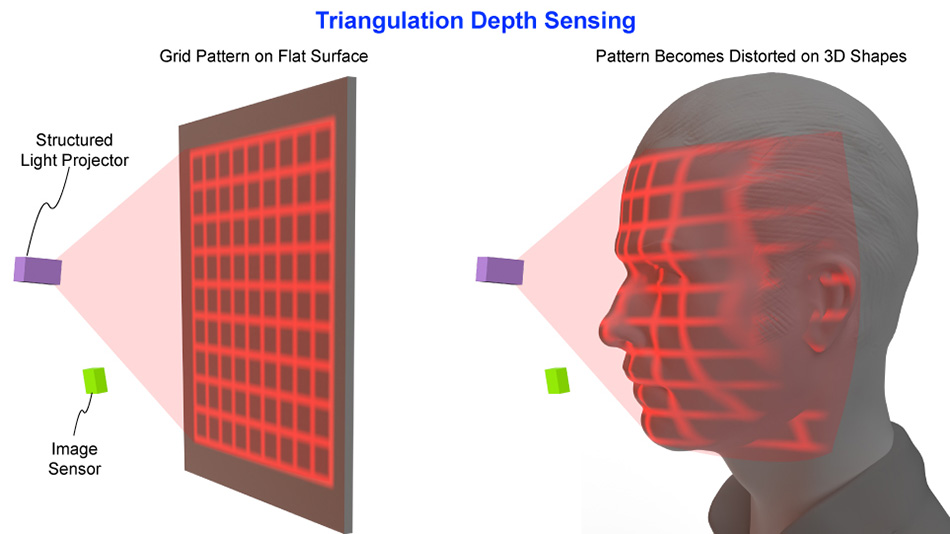
三角測量深度センシングの 1 つの形式では、構造化光パターンがシーンに投影され、イメージング システムがこのパターンの歪みを分析して、照射領域の深度情報を導き出します。
三角測量法は、表面の高解像度マッピングに優れています。短距離で最も効果を発揮するため、顔認識などのタスクに非常に役立ちます。
飛行時間型イメージング (ToF) には 2 つの異なる形式があります。 「直接飛行時間型」(dToF) では、シーンが光パルスで照らされ、システムは反射光パルスが戻ってくるまでの時間を測定します。光の速度は既知であるため、この戻り時間は次のように計算できます。この計算が画像内の各ピクセルに対して独立して実行される場合、シーン内の各点の深さの値を導き出すことができます。
ToF の 2 番目の形式は、「間接 Time-of-Flight」(iToF) です。ここで、照明は連続的な変調信号です。システムは、戻り光のこの変調の位相シフトを測定します。これにより、オブジェクトの距離を計算するために使用されるデータが提供されます。
ToF テクノロジーは、より広い領域と距離を迅速に測定できる点で優れています。これにより、仮想現実ヘッドセットでの部屋のスキャンやロボット ナビゲーションのための障害物検出などのタスクに最適になります。
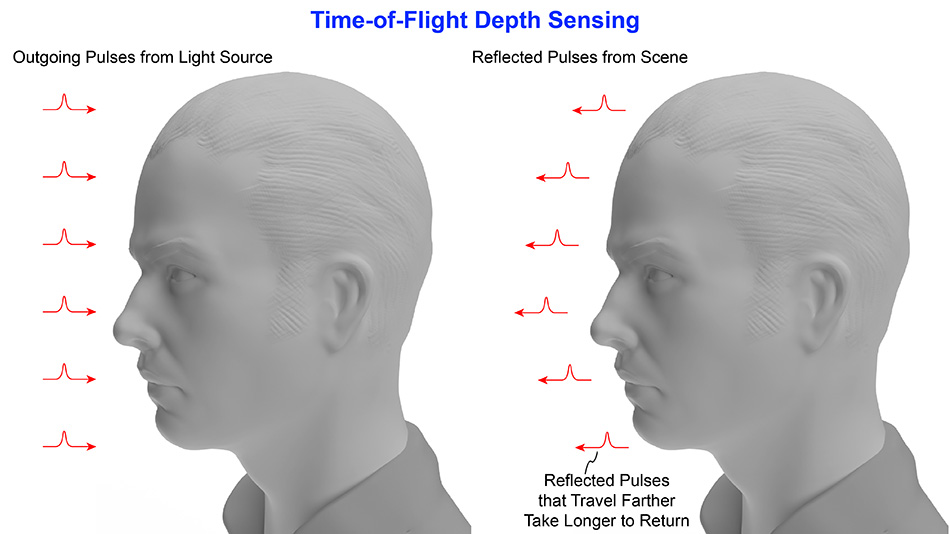
直接飛行時間センシングは、光パルスの往復移動時間を測定し、時間間隔を距離測定値に変換します。
3D センシングの光源要件
光源の特性は、三角測量と ToF 3D センシング法の両方の有効性と精度を決定する上で非常に重要です。各アプリケーションには固有の照明要件がありますが、特定の共通のニーズもあります。
三角測量はコヒーレント光源の恩恵を受けます。これにより、作成できるパターンの柔軟性が向上します。また、より高解像度の構造化パターンを形成し、長距離にわたってパターンの完全性を維持することも可能になります。
三角測量光源には、安定したビーム指向特性も必要です。これらに変動があると、不正確な深さ測定につながる可能性があります。
ToF システムには、短く正確な光パルス (dToF) または高周波数で変調可能な連続出力 (iToF) を放射できる光源が必要です。正確な距離測定には、立ち上がり時間と立ち下がり時間が短く、パルスのタイミングと変調周波数の精度が最も重要です。
ToF システム、特に広いエリアまたは長距離をカバーするためにフラッド照明を使用するシステムは、一般に三角測量システムよりも高い出力を必要とします。これにより、戻り光が検出されるのに十分な強度を持ち、システムが高レベルの周囲光でも適切に機能することが保証されます。
出力パワーが増大するにつれて、電力効率(入力電力に対する光出力パワーの比)の必要性がより重要になります。効率は、ポータブル (バッテリ駆動) デバイスに特に関係します。