












UN REGARD EN PROFONDEUR SUR LA DÉTECTION 3D
Coherent est l'un des principaux fournisseurs de solutions d'éclairage avancées pour les applications de détection 3D.
Le monde est tridimensionnel. Cette affirmation est si évidente que la plupart d’entre nous ne se demandent jamais comment nous la percevons. Mais en réalité, chacun de nos yeux capture une image plate, tout comme un appareil photo. Et c'est seulement dans notre cerveau que se produit la magie de former une perception 3D à partir de ces deux images plates.
Aujourd'hui, nous demandons de plus en plus aux systèmes numériques d'interagir avec le monde 3D, qu'il s'agisse d'interpréter des commandes gestuelles, d'effectuer une reconnaissance faciale ou de piloter automatiquement un véhicule. Pour accomplir ces tâches, nous devons leur donner au moins une partie de notre capacité à percevoir la profondeur.
DÉTECTION DE PROFONDEUR
Il existe deux approches de base utilisées pour la détection 3D (profondeur) en imagerie numérique : la triangulation et les mesures de temps de vol (ToF). Parfois, ces techniques sont même combinées.
La triangulation est basée sur la géométrie. Une forme de triangulation – la vision binoculaire – est la façon dont fonctionne la vision humaine 3D (stéréoscopique). Nous avons deux yeux séparés horizontalement. Cela signifie que chaque œil voit le monde sous un angle légèrement différent. Cette différence de perspective crée une parallaxe, c'est-à-dire un déplacement de la position d'un objet par rapport à l'arrière-plan en fonction de l'œil avec lequel vous regardez. Notre cerveau utilise ensuite ces informations de parallaxe pour détecter la profondeur (distance) des objets dans notre champ de vision et créer notre perception 3D unique et unifiée du monde.
Mais la vision stéréo peut dépendre des conditions d’éclairage et nécessite des surfaces texturées distinctes. Cela rend difficile une mise en œuvre fiable. Au lieu de cela, les systèmes de vision par ordinateur utilisent une autre forme de triangulation qui repose sur la « lumière structurée ». C'est juste un nom sophistiqué pour projeter un motif (comme une série de lignes ou de nombreux points lumineux) sur un objet et analyser la distorsion de ce motif sous un angle légèrement différent. Cela nécessite beaucoup moins de puissance de traitement que la recréation d’une véritable vision binoculaire et permet à un ordinateur de calculer rapidement les informations de profondeur et de reconstruire une scène 3D.
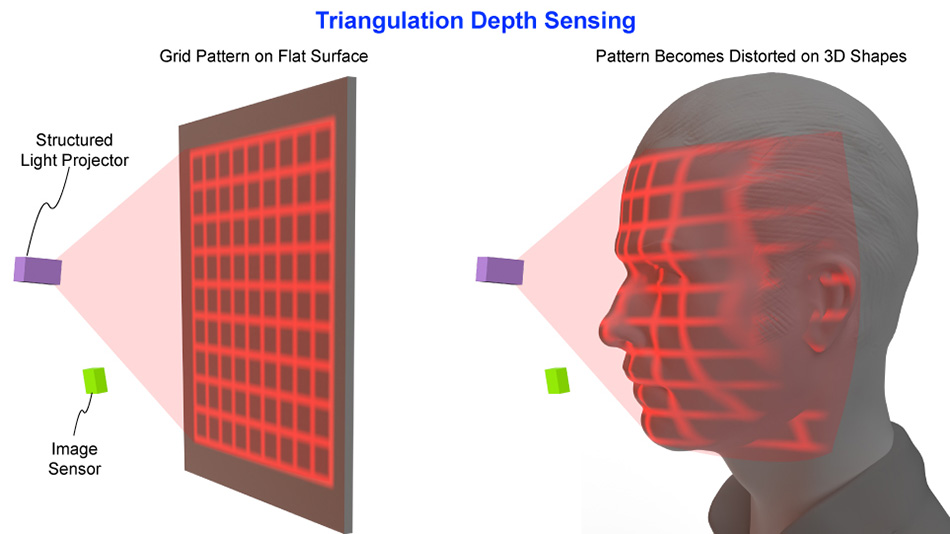
Dans une forme de détection de profondeur par triangulation, un motif de lumière structuré est projeté sur la scène, et un système d'imagerie analyse la distorsion de ce motif pour dériver des informations de profondeur pour la zone éclairée.
Les méthodes de triangulation excellent dans la cartographie haute résolution des surfaces. Ils fonctionnent mieux sur des distances plus courtes, ce qui les rend très utiles pour des tâches telles que la reconnaissance faciale.
L’imagerie du temps de vol (ToF) se présente sous deux formes différentes. En « temps de vol direct » (dToF), la scène est éclairée par des impulsions de lumière et le système mesure le temps nécessaire au retour des impulsions de lumière réfléchies. Puisque la vitesse de la lumière est connue, ce temps de retour peut être directement converti en distance Si ce calcul est effectué indépendamment pour chaque pixel d'une image, alors une valeur de profondeur en chaque point de la scène peut être dérivée.
La deuxième forme de ToF est le « temps de vol indirect » (iToF). Ici, l'éclairage est un signal continu et modulé. Le système mesure le déphasage de cette modulation dans la lumière renvoyée. Cela fournit les données utilisées pour calculer les distances des objets.
La technologie ToF brille par sa capacité à mesurer rapidement sur des zones et des distances plus grandes. Cela le rend idéal pour des tâches telles que l’analyse de pièce dans des casques de réalité virtuelle ou la détection d’obstacles pour la navigation de robots.
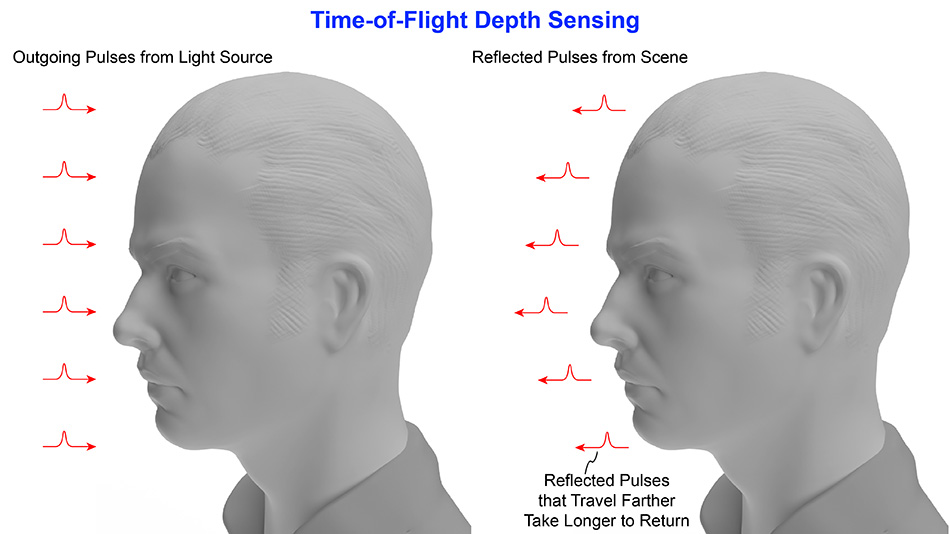
La détection directe du temps de vol mesure le temps de trajet aller-retour des impulsions lumineuses et convertit les intervalles de temps en mesures de distance.
EXIGENCES EN MATIÈRE DE SOURCE DE LUMIÈRE À DÉTECTION 3D
Les caractéristiques de la source lumineuse sont cruciales pour déterminer l’efficacité et la précision des méthodes de triangulation et de détection 3D ToF. Chaque application a des exigences d’éclairage uniques, même si elles ont également certains besoins communs.
La triangulation bénéficie d’une source lumineuse cohérente. Cela offre une plus grande flexibilité en termes de modèles pouvant être créés. Cela leur permet également de former des motifs structurés à plus haute résolution et de maintenir l’intégrité des motifs sur de plus longues distances.
Une source lumineuse de triangulation doit également avoir des caractéristiques de pointage de faisceau stables. Toute fluctuation de ces valeurs peut conduire à des mesures de profondeur inexactes.
Les systèmes ToF nécessitent une source de lumière capable d'émettre soit des impulsions lumineuses courtes et précises (dToF), soit une sortie continue pouvant être modulée à hautes fréquences (iToF). La précision de la synchronisation des impulsions et de la fréquence de modulation avec des temps de montée et de descente courts est primordiale pour une mesure précise de la distance.
Les systèmes ToF, en particulier ceux utilisant un éclairage par projecteur pour couvrir de grandes zones ou de longues distances, nécessitent généralement des puissances de sortie plus élevées que les systèmes de triangulation. Cela garantit que la lumière de retour aura une intensité suffisante pour être détectée et que le système fonctionnera bien avec des niveaux de lumière ambiante élevés.
À mesure que la puissance de sortie augmente, le besoin d’efficacité énergétique (le rapport entre la puissance de sortie optique et la puissance électrique d’entrée) devient plus important. L'efficacité devient particulièrement importante pour les appareils portables (fonctionnant sur batterie).