












UNA MIRADA EN PROFUNDIDAD A LA DETECCIÓN 3D
Coherent es un proveedor líder de soluciones de iluminación avanzadas para aplicaciones de detección 3D.
El mundo es tridimensional. Esta afirmación es tan obvia que la mayoría de nosotros nunca cuestionamos cómo la percibimos. Pero, en realidad, cada uno de nuestros ojos capta una imagen plana, como una cámara. Y es sólo en nuestro cerebro donde ocurre la magia de formar una percepción tridimensional a partir de esas dos imágenes planas.
Hoy en día, pedimos cada vez más a los sistemas digitales que interactúen con el mundo 3D, ya sea para interpretar controles gestuales, realizar reconocimiento facial o pilotar automáticamente un vehículo. Para realizar estas tareas, debemos darles al menos parte de nuestra capacidad de percibir profundidad.
SENSACIÓN DE PROFUNDIDAD
Hay dos enfoques básicos utilizados para la detección 3D (profundidad) en imágenes digitales: triangulación y mediciones de tiempo de vuelo (ToF). A veces incluso se combinan estas técnicas.
La triangulación se basa en la geometría. Una forma de triangulación (la visión binocular) es la forma en que opera la visión humana 3D (estereoscópica). Tenemos dos ojos separados horizontalmente. Esto significa que cada ojo ve el mundo desde un ángulo ligeramente diferente. Esta diferencia de perspectiva crea un paralaje, es decir, un cambio en la posición de un objeto en relación con el fondo dependiendo del ojo con el que se mire. Luego, nuestro cerebro usa esta información de paralaje para sentir la profundidad (distancia) de los objetos en nuestro campo de visión y crear nuestra percepción tridimensional única y unificada del mundo.
Pero la visión estéreo puede depender de las condiciones de iluminación y requiere superficies con texturas distintas. Esto dificulta su implementación confiable. En cambio, los sistemas de visión por computadora utilizan otra forma de triangulación que se basa en "luz estructurada". Este es sólo un nombre elegante para proyectar un patrón (como una serie de líneas o numerosos puntos de luz) sobre un objeto y analizar la distorsión de este patrón desde un ángulo ligeramente diferente. Esto requiere mucha menos potencia de procesamiento que recrear una visión binocular real y permite que una computadora calcule rápidamente información de profundidad y reconstruya una escena en 3D.
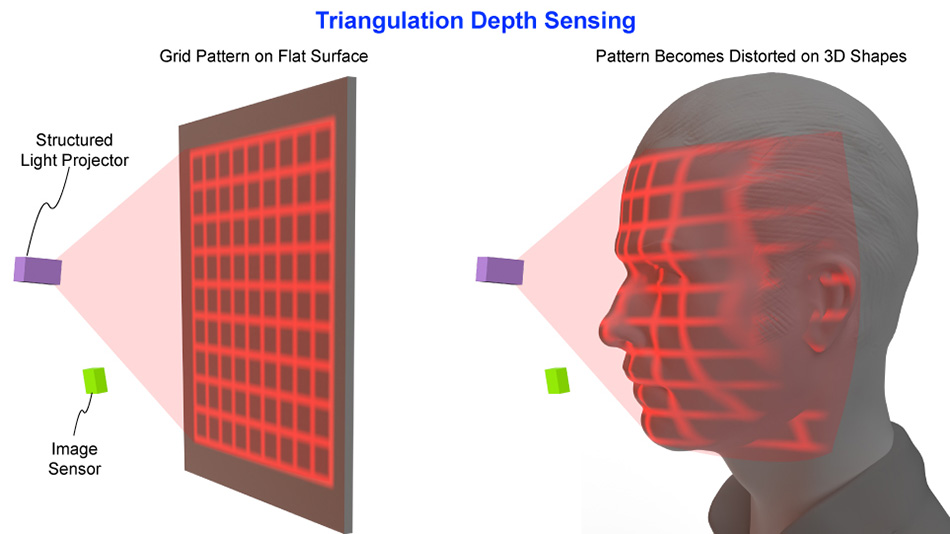
En una forma de detección de profundidad por triangulación, se proyecta un patrón de luz estructurado sobre la escena y un sistema de imágenes analiza la distorsión de este patrón para derivar información de profundidad para el área iluminada.
Los métodos de triangulación destacan en el mapeo de superficies de alta resolución. Funcionan mejor en distancias más cortas, lo que los hace muy útiles para tareas como el reconocimiento facial.
Las imágenes de tiempo de vuelo (ToF) se presentan en dos formas diferentes. En el "tiempo de vuelo directo" (dToF), la escena se ilumina con pulsos de luz y el sistema mide el tiempo que tardan los pulsos de luz reflejados en regresar. Dado que se conoce la velocidad de la luz, este tiempo de retorno puede ser convertido directamente en distancia. Si este cálculo se realiza de forma independiente para cada píxel de una imagen, se puede derivar un valor de profundidad en cada punto de la escena.
La segunda forma de ToF es el "tiempo de vuelo indirecto" (iToF). Aquí la iluminación es una señal modulada continua. El sistema mide el cambio de fase de esta modulación en la luz devuelta. Esto proporciona los datos utilizados para calcular las distancias de los objetos.
La tecnología ToF destaca por su capacidad para medir rápidamente áreas y distancias más grandes. Esto lo hace ideal para tareas como escaneo de habitaciones con cascos de realidad virtual o detección de obstáculos para la navegación de robots.
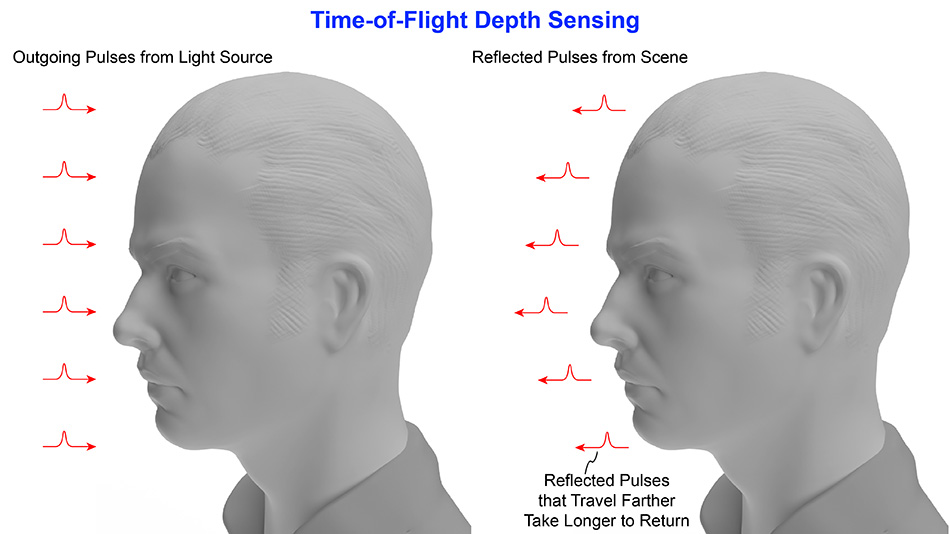
La detección directa de tiempo de vuelo mide el tiempo de viaje de ida y vuelta de los pulsos de luz y convierte los intervalos de tiempo en mediciones de distancia.
REQUISITOS DE FUENTE DE LUZ DE DETECCIÓN 3D
Las características de la fuente de luz son cruciales para determinar la efectividad y precisión de los métodos de detección 3D de triangulación y ToF. Cada aplicación tiene requisitos de iluminación únicos, aunque también tienen ciertas necesidades comunes.
La triangulación se beneficia de una fuente de luz coherente. Esto proporciona una mayor flexibilidad en términos de los patrones que se pueden crear. También les permite formar patrones estructurados de mayor resolución y mantener la integridad del patrón en distancias más largas.
Una fuente de luz de triangulación también debe tener características estables de orientación del haz. Cualquier fluctuación en estos puede dar lugar a mediciones de profundidad inexactas.
Los sistemas ToF requieren una fuente de luz capaz de emitir pulsos de luz cortos y precisos (dToF) o una salida continua que pueda modularse a altas frecuencias (iToF). La precisión en la sincronización del pulso y la frecuencia de modulación con tiempos de subida y bajada cortos es fundamental para una medición precisa de la distancia.
Los sistemas ToF, especialmente aquellos que utilizan iluminación de inundación para cubrir áreas grandes o largas distancias, generalmente requieren potencias de salida más altas que los sistemas de triangulación. Esto garantiza que la luz de retorno tendrá suficiente intensidad para ser detectada y que el sistema funcionará bien con altos niveles de luz ambiental.
A medida que aumenta la potencia de salida, la necesidad de eficiencia energética (la relación entre la potencia óptica de salida y la potencia eléctrica de entrada) se vuelve más importante. La eficiencia se vuelve particularmente relevante para los dispositivos portátiles (que funcionan con baterías).