












EEN DIEPTE KIJK OP 3D-DETECTIE
Coherent is een toonaangevende leverancier van geavanceerde verlichtingsoplossingen voor 3D-detectietoepassingen.
De wereld is driedimensionaal. Die uitspraak is zo voor de hand liggend dat de meesten van ons zich nooit afvragen hoe we deze waarnemen. Maar in feite legt elk van onze ogen een vlak beeld vast – net als een camera. En het is alleen in onze hersenen dat de magie van het vormen van een 3D-perceptie uit die twee platte beelden plaatsvindt.
Tegenwoordig vragen we digitale systemen steeds vaker om interactie met de 3D-wereld – of het nu gaat om het interpreteren van gebarenbediening, het uitvoeren van gezichtsherkenning of het automatisch besturen van een voertuig. Om deze taken te volbrengen, moeten we ze op zijn minst een deel van ons vermogen geven om diepte waar te nemen.
DIEPTEDETECTIE
Er worden twee basisbenaderingen gebruikt voor 3D-(diepte)detectie bij digitale beeldvorming: triangulatie en time-of-flight (ToF)-metingen. Soms worden deze technieken zelfs gecombineerd.
Triangulatie is gebaseerd op geometrie. Eén vorm van triangulatie – binoculair zicht – is de manier waarop het menselijke 3D (stereoscopisch) zicht werkt. We hebben twee ogen horizontaal gescheiden. Dit betekent dat elk oog de wereld vanuit een iets andere hoek ziet. Dit verschil in perspectief creëert een parallax, dat wil zeggen een verschuiving in de positie van een object ten opzichte van de achtergrond, afhankelijk van met welk oog je kijkt. Onze hersenen gebruiken deze parallaxinformatie vervolgens om de diepte (afstand) van objecten in ons gezichtsveld waar te nemen en onze enkele, uniforme 3D-perceptie van de wereld te creëren.
Maar stereovisie kan afhankelijk zijn van de lichtomstandigheden en vereist verschillende gestructureerde oppervlakken. Deze maken het moeilijk om op betrouwbare wijze te implementeren. In plaats daarvan gebruiken computervisiesystemen een andere vorm van triangulatie die afhankelijk is van ‘gestructureerd licht’. Dit is gewoon een mooie naam voor het projecteren van een patroon (zoals een reeks lijnen of meerdere lichtvlekken) op een object en het analyseren van de vervorming van dit patroon vanuit een iets andere hoek. Dit vergt veel minder verwerkingskracht dan het reproduceren van echt binoculair zicht, en het stelt een computer in staat snel diepte-informatie te berekenen en een 3D-scène te reconstrueren.
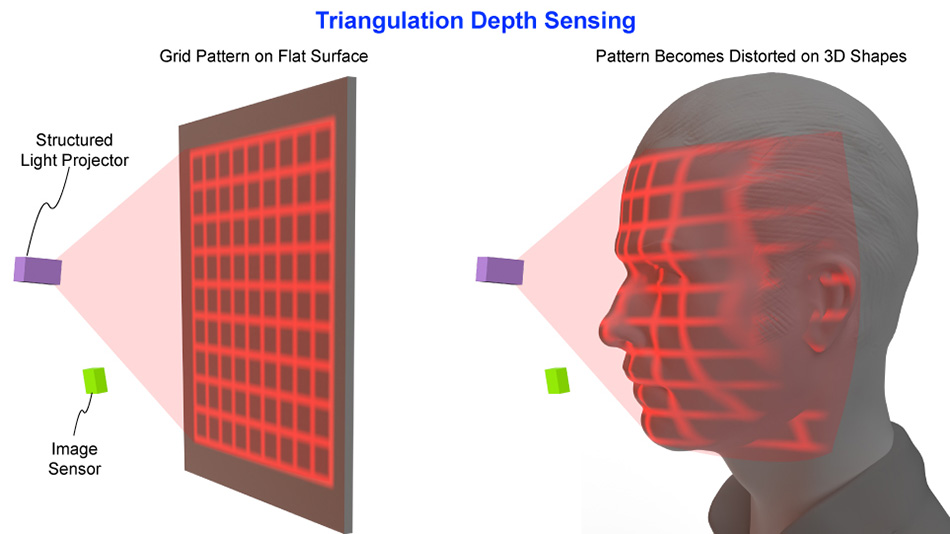
Bij één vorm van triangulatie-dieptewaarneming wordt een gestructureerd lichtpatroon op de scène geprojecteerd, en een beeldvormingssysteem analyseert de vervorming van dit patroon om diepte-informatie voor het verlichte gebied af te leiden.
Triangulatiemethoden blinken uit in het in kaart brengen van oppervlakken met hoge resolutie. Ze werken het beste over kortere afstanden, waardoor ze erg handig zijn voor taken als gezichtsherkenning.
Time-of-Flight-beeldvorming (ToF) bestaat in twee verschillende vormen. Bij “direct Time-of-Flight” (dToF) wordt de scène verlicht met lichtpulsen en meet het systeem de tijd die nodig is voordat de gereflecteerde lichtpulsen terugkeren. Omdat de snelheid van het licht bekend is, kan deze terugkeertijd worden bepaald direct omgezet in afstand Als deze berekening voor elke pixel in een afbeelding onafhankelijk wordt uitgevoerd, kan op elk punt in de scène een dieptewaarde worden afgeleid.
De tweede vorm van ToF is "indirecte Time-of-Flight" (iToF). Hier is de verlichting een continu, gemoduleerd signaal. Het systeem meet de faseverschuiving van deze modulatie in het teruggekaatste licht. Dit levert de gegevens op die worden gebruikt om objectafstanden te berekenen.
ToF-technologie blinkt uit in zijn vermogen om snel over grotere gebieden en afstanden te meten. Dit maakt hem ideaal voor taken zoals het scannen van kamers in virtual reality-headsets of obstakeldetectie voor robotnavigatie.
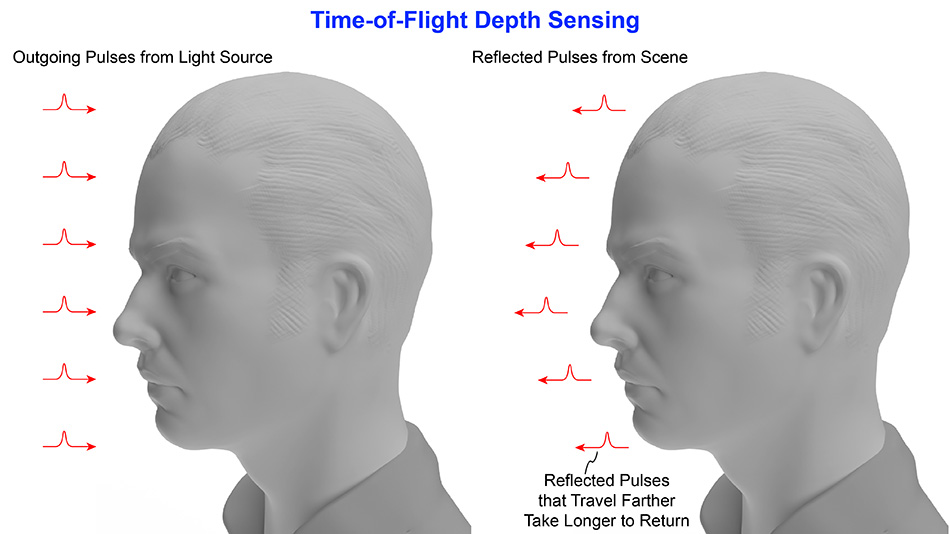
Directe Time-of-Flight-detectie meet de reistijd van lichtpulsen heen en terug en zet de tijdsintervallen om in afstandsmetingen.
3D-DETECTIE LICHTBRONVEREISTEN
De kenmerken van de lichtbron zijn cruciaal bij het bepalen van de effectiviteit en nauwkeurigheid van zowel triangulatie als ToF 3D-detectiemethoden. Elke toepassing heeft unieke verlichtingsvereisten, hoewel ze ook bepaalde gemeenschappelijke behoeften hebben.
Triangulatie heeft baat bij een coherente lichtbron. Dit biedt een grotere flexibiliteit in termen van de patronen die kunnen worden gemaakt. Het stelt hen ook in staat om gestructureerde patronen met een hogere resolutie te vormen en de patroonintegriteit over langere afstanden te behouden.
Een triangulatielichtbron moet ook stabiele bundelrichtkarakteristieken hebben. Eventuele schommelingen hierin kunnen leiden tot onnauwkeurige dieptemetingen.
ToF-systemen vereisen een lichtbron die korte, nauwkeurige lichtpulsen (dToF) of een continue output kan uitzenden die op hoge frequenties kan worden gemoduleerd (iToF). De precisie in pulstiming en modulatiefrequentie met korte stijg- en daaltijden is van cruciaal belang voor nauwkeurige afstandsmetingen.
ToF-systemen, vooral systemen die gebruik maken van schijnwerperverlichting om grote gebieden of lange afstanden te overbruggen, vereisen over het algemeen hogere uitgangsvermogens dan triangulatiesystemen. Dit zorgt ervoor dat het retourlicht voldoende intensiteit heeft om te worden gedetecteerd, en dat het systeem goed zal functioneren bij veel omgevingslicht.
Naarmate het uitgangsvermogen toeneemt, wordt de behoefte aan energie-efficiëntie (de verhouding tussen het optische uitgangsvermogen en het elektrische ingangsvermogen) belangrijker. Efficiëntie wordt vooral relevant voor draagbare (op batterijen werkende) apparaten.