












UNO SGUARDO APPROFONDITO AL RILEVAMENTO 3D
Coherent è un fornitore leader di soluzioni di illuminazione avanzate per applicazioni di rilevamento 3D.
Il mondo è tridimensionale. Questa affermazione è così ovvia che la maggior parte di noi non si chiede mai come la percepiamo. Ma in realtà ciascuno dei nostri occhi cattura un’immagine piatta, proprio come una macchina fotografica. Ed è solo nel nostro cervello che avviene la magia di formare una percezione 3D da quelle due immagini piatte.
Oggi chiediamo sempre più spesso ai sistemi digitali di interagire con il mondo 3D, sia che si tratti di interpretare i controlli gestuali, eseguire il riconoscimento facciale o pilotare automaticamente un veicolo. Per svolgere questi compiti, dobbiamo dare loro almeno parte della nostra capacità di percepire la profondità.
RILEVAMENTO DELLA PROFONDITÀ
Esistono due approcci di base utilizzati per il rilevamento 3D (profondità) nell'imaging digitale: la triangolazione e le misurazioni del tempo di volo (ToF). A volte queste tecniche sono addirittura combinate.
La triangolazione si basa sulla geometria. Una forma di triangolazione, la visione binoculare, è il modo in cui opera la visione umana 3D (stereoscopica). Abbiamo due occhi separati orizzontalmente. Ciò significa che ogni occhio vede il mondo da un'angolazione leggermente diversa. Questa differenza di prospettiva crea una parallasse, ovvero uno spostamento nella posizione di un oggetto rispetto allo sfondo a seconda dell'occhio con cui stai guardando. Il nostro cervello utilizza quindi queste informazioni di parallasse per percepire la profondità (distanza) degli oggetti nel nostro campo visivo e creare la nostra percezione 3D unica e unificata del mondo.
Ma la visione stereo può dipendere dalle condizioni di illuminazione e richiede superfici strutturate distinte. Ciò rende difficile un’implementazione affidabile. Invece, i sistemi di visione artificiale utilizzano un’altra forma di triangolazione che si basa sulla “luce strutturata”. Questo è solo un nome di fantasia per proiettare uno schema (come una serie di linee o numerosi punti di luce) su un oggetto e analizzare la distorsione di questo schema da un'angolazione leggermente diversa. Ciò richiede molta meno potenza di elaborazione rispetto alla ricostruzione della vera visione binoculare e consente a un computer di calcolare rapidamente le informazioni sulla profondità e ricostruire una scena 3D.
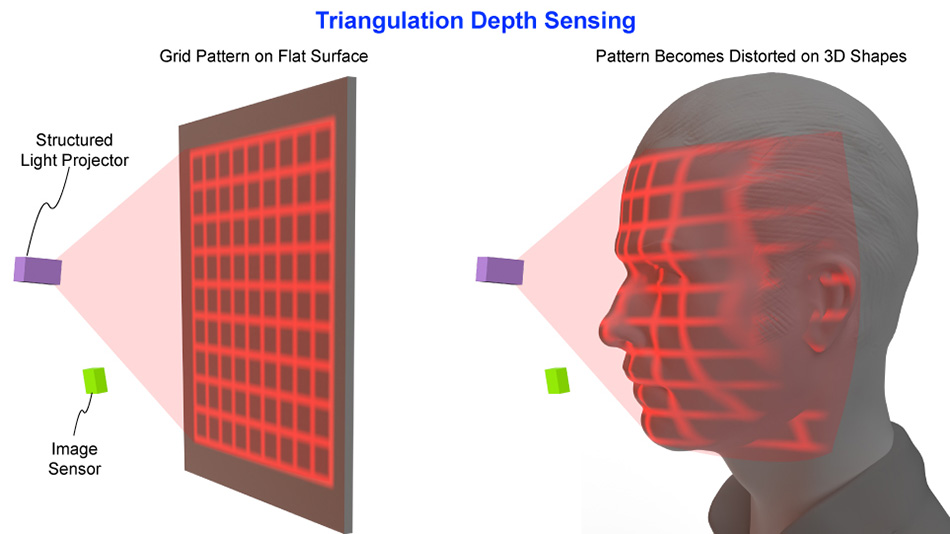
In una forma di rilevamento della profondità a triangolazione, uno schema di luce strutturato viene proiettato sulla scena e un sistema di imaging analizza la distorsione di questo schema per ricavare informazioni sulla profondità per l'area illuminata.
I metodi di triangolazione eccellono nella mappatura ad alta risoluzione delle superfici. Funzionano meglio su distanze più brevi, rendendoli molto utili per attività come il riconoscimento facciale.
L'imaging del tempo di volo (ToF) è disponibile in due forme diverse. Nel "tempo di volo diretto" (dToF) la scena è illuminata con impulsi di luce e il sistema misura il tempo impiegato dagli impulsi di luce riflessa per ritornare. Poiché la velocità della luce è nota, questo tempo di ritorno può essere convertito direttamente in distanza. Se questo calcolo viene eseguito in modo indipendente per ciascun pixel di un'immagine, è possibile ricavare un valore di profondità in ciascun punto della scena.
La seconda forma di ToF è il "tempo di volo indiretto" (iToF). Qui l'illuminazione è un segnale continuo e modulato. Il sistema misura lo sfasamento di questa modulazione nella luce restituita. Ciò fornisce i dati utilizzati per calcolare le distanze degli oggetti.
La tecnologia ToF eccelle nella sua capacità di misurare rapidamente aree e distanze più grandi. Ciò lo rende ideale per attività come la scansione di stanze con visori per realtà virtuale o il rilevamento di ostacoli per la navigazione dei robot.
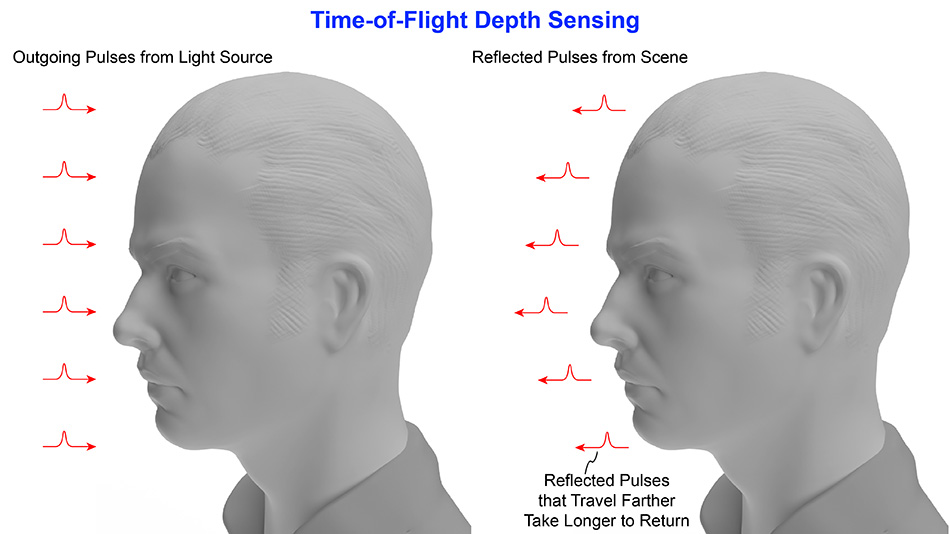
Il rilevamento diretto del tempo di volo misura il tempo di viaggio di andata e ritorno degli impulsi luminosi e converte gli intervalli di tempo in misurazioni di distanza.
REQUISITI DELLA SORGENTE LUMINOSA DEL RILEVAMENTO 3D
Le caratteristiche della sorgente luminosa sono cruciali nel determinare l'efficacia e la precisione dei metodi di triangolazione e di rilevamento 3D ToF. Ogni applicazione ha requisiti di illuminazione unici, sebbene abbiano anche alcune esigenze comuni.
La triangolazione beneficia di una fonte di luce coerente. Ciò fornisce una maggiore flessibilità in termini di modelli che possono essere creati. Consente inoltre loro di formare modelli strutturati ad alta risoluzione e di mantenere l'integrità del modello su distanze più lunghe.
Una sorgente luminosa a triangolazione deve anche avere caratteristiche di puntamento del fascio stabili. Eventuali fluttuazioni di questi valori possono portare a misurazioni della profondità imprecise.
I sistemi ToF richiedono una sorgente luminosa in grado di emettere impulsi di luce brevi e precisi (dToF) o un'uscita continua che può essere modulata ad alte frequenze (iToF). La precisione nella temporizzazione degli impulsi e nella frequenza di modulazione con tempi di salita e discesa brevi è fondamentale per una misurazione accurata della distanza.
I sistemi ToF, in particolare quelli che utilizzano l'illuminazione diffusa per coprire vaste aree o lunghe distanze, richiedono generalmente potenze di uscita più elevate rispetto ai sistemi di triangolazione. Ciò garantisce che la luce di ritorno abbia un'intensità sufficiente per essere rilevata e che il sistema funzioni bene con livelli elevati di luce ambientale.
Man mano che la potenza in uscita aumenta, la necessità di efficienza energetica (il rapporto tra potenza ottica in uscita e potenza elettrica in ingresso) diventa più importante. L'efficienza diventa particolarmente rilevante per i dispositivi portatili (funzionanti a batteria).